






























































با بيشتر شدن تعداد كمپاني هايي كه جذب طراحي خودروهاي خودگردان شده اند، الگوهايي حول اينكه چه ويژگي هايي باعث پيشرفت و حركت رو به جلو و يا عقبگرد صنعت خودروسازي ميشود شروع به شكل گيري کرده است.
با فكر كردن در مورد آينده ي خودروهاي خودگردان ميتوان انتظار داشت كه تعداد سنسورهای بكار گرفته شده در خودروها ده برابر شود، اما چه نوع سنسورهايي بيشترين كاربرد و فايده را در پي خواهند داشت.
سیستم های بینایی – سنسورها
پیش از آنکه مسابقات بزرگ خودروهای خودران (DAPRA) و اقدامات انجام شده توسط گوگل باعث پیشرفت و شهرت یافتن خودروهای خودگردان (خودران) شود، سنسورهای سیستم های پبشرفته راهنمای راننده (ADAS) بسیار ساده بوده، نرخ های نمونه برداری (نرخ نمونه برداری عبارت است از تعداد دفعات نمونه برداری از سیگنال صوت در واحد زمان) بسیار پایین و پردازش واحد کنترل الکترونیک (ECU) در حد قابیلیت های یک ریزکنترلگر کوچک بوده است. اما پس از مطرح شدن بحث جایگزینی حسگرهای دریافتی انسانها (چشمان) و پردازش تصاویر (مغز) به عنوان یک کار عظیم، تمام آنچه گفته شد تغییر پیدا کرد. تا پیش از آن زمان، رادار پارکینگ که با کمک مبدل های فراصوت کار مینمود، پیچیده ترین سیستم برای بازبینی وقایع بیرون از محیط خودرو تلقی میشد. حال افراد فعال در این صنعت به دنبال ساخت و توسعه ی یک سنسور بینایی هستند که عملکردی همچون یک چشم انسانی دارد. در حقیقت زمانی که ویژگی های یک چشم مصنوعی که قادر به ارائه کیفیت داده ی لازم برای خودکارسازی راننده باشد را یادداشت میکنید، چشمان انسانی در مقابل آن بسیار ساده به نظر می آید. حال نگاهی به برخی از ساده ترین ویژگی های یک سیستم بینایی بیاندازید:
- این سیستم باید اطراف وسیله نقلیه را به صورت افقی و 360 درجه پوشش بدهد.
- این سیستم باید اشیاء نزدیک یا دور از وسیله نقلیه را به صورت سه بعدی 3D تجسم کند.
- این سیستم باید چندین شیء ثابت/در حال حرکت را در بالاترین برد ممکن تجسم کرده و تشخیص دهد.
- این سیستم باید تمام ویژگی های ذکر شده را در هر نوع شرایط نوری و آب و هوایی دارا باشد.
- در آخر، سیستم مربوطه باید تمامی این داده ها را به صورت همزمان با وقوع رخداد فراهم سازد.
حال ببینید که چشمان انسانی چگونه ویژگی های ذکرشده را برآورده میسازند :
- دو چشم انسانی با حرکت خود، میدان دیدی تا سقف 200 درجه را به صورت افقی ارائه میکنند.
- دید سه بعدی ﴿برای هر دو چشم در آن واحد﴾ برای میدان دید 130 درجه وجود دارد.
- تنها میدان دید 45 تا 50 درجه است که با حداکثر میزان حرکت و قدرت تشخیص رنگ ها، از «رزولوشن بالا» برخوردار است.
- خارج از محدوده مرکزی، قدرت تشخیص به سرعت کاهش پیدا میکند – «دید پیرامونی»
- عنبیه به صورت خودکار و تحت شرایط نوری مختلف، عملکرد خوبی را ارائه میکند.
- یک «نرخ فریم» ویدئویی مشابه، در محدوده مرکزی چشم خوب عمل کرده و در محدوده های دید پیرامونی بد عمل میکند.
- هر یک از چشمان انسانی دارای یک «نقطه-کور» هستند که در آنجا عصب چشمی به شبکیه متصل میشود.
- تمامی موارد بالا عواملی چون سن، بیماری، آسیب ها و نقص های مرتبط را نادیده میگیرند.
در نتیجه میتوان گفت که چشمان رانندگان انسانی تنها در یک محدوده باریک و در صورت نگاه به روبرو قادر به ارائه ی یک دید قابل پذیرش است. و از سوی دیگر بحث نقاط کور چشمان انسانی مطرح است. با توجه به محدودیت های کره ی چشم، چرا از یک دریچه باریک که بخشی از تصویر در آن حذف شده به زندگی نگاه نمیکنیم؟ پاسخ این سوال در مغز ما وجود دارد: مغز ما با کمک یک سری حدس های هوشمندانه شروع به «پر کردن جاهای خالی» میکند. اما به راحتی میتوان آن را گمراه نمود.
1. چشم های مصنوعی – دوربین ها
دوربین ها کاندیدی عالی به عنوان یک چشم مصنوعی هستند که ازخیلی لحاظ از عملکردی چه بسا بهتر از همتای طبیعی خود برخوردار هستند:
- حفظ رزولوشن بالای پیکسل ها و رنگ ها در عرض کامل میدان دید
- حفظ «نرخ فریم» ثابت در میدان دید
- ارائه دیدی 3بعدی و برجسته توسط دو دوربین
- دوربینها سیستم هایی بی کنش (منفعل) هستند که مخابره های صورت گرفته در سایر خودروها نمیتواند به صورت همزمان مشکلی برای آنها به وجود آورد.
- حفظ عملکرد در گذر زمان – دوربین های دچار تب یا تباهی لکه زرد (نوعی بیماری چشمی) نمیشوند.
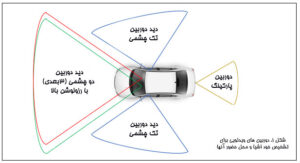
شکل 1. این شکل نشان دهنده ی یک سیستم مناسب سیستم ADAS است که عملکردهایی چون جلوگیری از برخورد از جلو، هشدارهای خروج از خط، تشخیص عابرپیاده، راهنمای پارک خودرو و کروز کنترل (کنترل سرعت خودرو در سرعت تعیین شده توسط راننده)قابل تنظیم را ارائه میکند. هر چند که عدم وجود پوشش دهی 360 درجه، طراحی این سیستم را برای خودروهای خودران سطح 4 و 5 نامناسب میسازد. آگاهی کامل یافتن از شرایط اطراف خودرو امکان پذیر است، اما برای انجام این کار حداقل به شش دوربین و حجم عظیمی از پردازش دیجیتال نیاز خواهد بود. با این وجود در این شرایط، این سیستم ها با قابلیت های چشم های انسانی برابری کرده و یا از آنها پیشی میگیرند. علیرغم آنچه گفته شد، سه مسئله حائزاهمیت بوده و باید مورد توجه قرار بگیرد:
- عملکرد در شرایط نوری ضعیف، به عنوان مثال در شب ها
- عملکرد در شرایط آب و هوایی بد. در صورتی که لنزها با کثیفی و یخ پوشانده شوند چه اتفاقی خواهد افتاد؟
- نیاز به دوربین های گران قیمت و مستحکم که قادر به کار در محدوده های گسترده دمایی باشند.
مسئله دیگر آن است که تنها قابلیت دیدن ترافیک پیش رو نیست که آسیب پذیر است؛ این امکان نیز وجود دارد که خطوط ترسیم شده بین لاین خودروها تحت شعاع آب و برف قرار گرفته و به خوبی دید نداشته باشند و در نتیجه سیستم های هشدار خروج از خط را غیرقابل اعتماد سازند.
برگرفته از مجلات آنلاین eetimes و rs-online




