
2. چشم های مصنوعی – لیدار
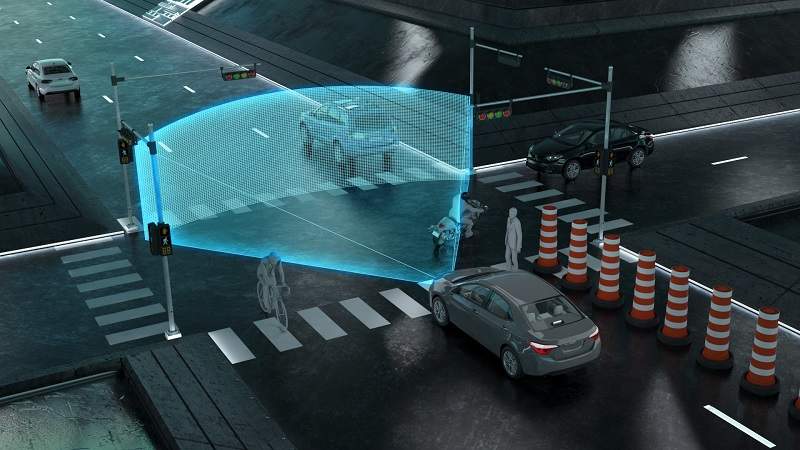
لیدار یا سیستم های مسافت یابی و ردیابی به وسیله سیگنال های نوری همچون رادارهای مایکرویو مرسوم بر اساس یک قاعده مشابه کار میکند. پالس های منتشر شده از نور لیزر، از یک شیء به یک سیستم تشخیص (دیتکتور) منعکس شده و زمان پرواز (زمان پرواز پراش، روشی حساس و دقیق برای اندازهگیری اندازه عیوب ترک مانند در آزمون فراصوت میباشد) آن اندازه گیری میشود. شعاع نور بسیار باریک و نرخ اسکن به قدری سریع است که بازنمایی های 3بعدی شکل گرفته از محیط اطراف خودرو را میتوان به صورت همزمان با وقوع رخداد ساخت. سیستم های لیدار از چند جهت مختلف نسبت به دوربین ها برتری دارند:
• وجود پوشش دهی سه بعدی و 360 درجه در تنها یک واحد منفرد
• تاثیرناپذیر از میزان روشنایی و داشتن عملکرد بهتر در شرایط آب و هوایی بد
• تخمین بهتر فواصل
• دامنه ی طولانی تر
• در مقایسه با دوربین ها، داده های به دست آمده از سنسور لیدار به میزان پردازش به مراتب کمتری احتیاج دارد.
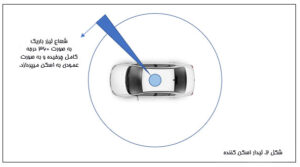
یک اسکنر لیدار نصب شده روی سقف ماشین ( به شکل. 2 توجه کنید) میتواند در تئوری، تقریبا تمام اطلاعات لازم برای قابلیت های پیشرفته ADAS یا خودرانی خودروها را فراهم سازد. نخستین نمونه های ارائه شده توسط گوگل این سیستم ها را به صورت دام ارائه نمودند و برخی از تولیدکنندگان خودرو معتقدند که لیدار به تنهایی میتواند عملیات های قابل اعتمادی را از خود نشان دهد. اما این سیستم ها نقاط ضعفی نیز دارند:
• رزولوشن این نوع سیستم کمتر از دوربین ها است.
• این سیستم قادر به دیدن نشانه گذاری های دوبعدی نیست و در نتیجه برای هشدارهای خروج از خود مناسب نیست.
• به همین دلیل، این سیستم قادر به خواندن علامت های هشداردهنده ی در جاده نمیباشد.
• سخت افزار الکترومکانیکی معروف این سیستم تا به حال بسیار گران قیمت بوده است.
• انرژی خروجی لیزر محدود است، چرا که طول موج های 1000-600 نانومتری میتوانند به چشمان سایر کاربران جاده آسیب برسانند. واحدهای آینده میتوانند از طول موج هایی با آسیب کمتر یعنی 1550 نانومتر استفاده کنند.
با نیمه رسانا شدن اسکنرهای لیدار، هزینه های این سیستم ها در حال پایین آمدن است، اما این به معنای افول رزولوشن است که به خاطر تعداد کانالهای کمتری (شاید تعداد 8 کانال به جای 64 کانال) که مورد استفاده قرار میگیرند رخ میدهد. برخی از این سیستم ها به گونه ای طراحی شده اند که بتوان آنها را در اطراف خودرو پخش کرد، به طوری که هر یک از این سیستم ها یک پوشش دهی نسبی ارائه کرده و از یک برآمدگی بدریخت در سقف ماشین جلوگیری کنند.
3. چشم های مصنوعی – رادار
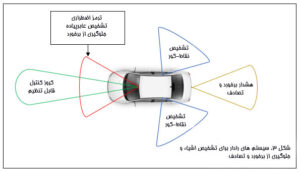
از رادارهای مایکروویو میتوان برای تشخیص اشیاء در بردهای کوتاه (10متر) و بردهای بلند (100متر) استفاده نمود. از این رادارها میتوان برای عملکردهایی چون کروز کنترل قابل تنظیم، جلوگیری از برخورد از جلو، تشخیص نقاط کور، راهنمای پارک خودرو و هشدارهای پیش از تصادف استفاده نمود (به شکل. 3 توجه کنید). در این سیستم ها دو باند فرکانس به صورت کلی مورد استفاده قرار میگیرد: باند فرکانش 24-29 گیگاهرتزی برای بردهای کوتاه و باند فرکانس 76-77 گیگاهرتزی برای استفاده های بردهای بلند. باند با برد پایین تر از لحاظ انرژی مصرفی و پهنای باند دارای محدودیت هایی است که آن هم به خاطر مشترک بودن آن با سایر کاربران است. باند با برد بالاتر (که به زودی به 81 گیگاهرتز خواهد رسید) از پهنای باند بهتری برخوردار بوده و سطوح انرژی بالاتری در آن مورد استفاده قرار میگیرد. پهنای باند بالاتر به معنای رزولوشن بهتر برای هر دو کارکردهای کوتاه-برد و بلند-برد است و به زودی باعث توقف تولید بردهای 24-29 گیگاهرتزی برای رادارها میشود. این سیستم در دو نوع مختلف موجود است: رادارهای زمان پرواز پالس ساده و رادارهاي موج پيوسته مدوله شده با فركانس (FMCW). رادارهای FMCW دارای حجم زیادی بخش مازاد در سیگنال ارسالی هستند که دریافت کننده را قادر میسازد تا در شرایط نه چندان مناسب نویز فرکانس رادیویی RF همچنان عملکرد خوبی داشته باشد. این به معنای آن است که در شرایط مساعد، برد وسیعتری را در اختیار دارید و یا در بردهای کوتاه میتوانید در مقابل تداخل های بزرگ دوام آورید. استفاده از این سیستم ها به تنهایی نمیتواند آن طور كه بايد برای خودروهای خودگردان مناسب باشد، با این حال این سیستم ها از مزیت هاي مخصوص خود برخوردار هستند.
• اين سيستم ها تحت تاثير سطح نور قرار نميگيرند و در شرايط آب و هوايي بد از عملكرد خوبي برخوردار هستند.
• از زمان طرح اين نوع سيستم ها مدتي است كه ميگذرد، بنابراين سخت افزارهاي خودگردان بسيار پيشرفته اي در بازار موجود است.
• رادارها كاربردهاي خاص خود را دارند، اما محدوديت هاي اين نوع سيستم ها باعث تبديل آنها به سيستم هاي راهنماي راننده ADAS ساده اي ميشوند.
• رادارها رزولوشن لازم براي شناسايي نوع اشياء را دارا نبوده و تنها قادر به تشخيص وجود آنها هستند.
• رادار باندهاي ٢٩-٢٤ گيگاهرتزي قادر نيستند كه به صورت قابل اعتماد به تشخيص بين چند سوژه ي مختلف بپردازند.
• رادارهاي FMCW نيازمند پردازش پيچيده سيگنال در گيرنده هستند.
نتیجه
نتيجه بديهي آنچه تا بحال گفته شد اين است كه هر سه سيستم دوربين، ليدار، رادار و يا حتي سونارهاي فراصوت، حداقل در یک بازه زمانی كوتاه مدت، براي رسيدن به خودروهاي خودگردان سطح ٤ و سطح ٥ لازم هستند. تركيب خروجي تمام اين سيستم ها در فرمي كه يك نرم افزار رانندگي واقعي بتواند از آن استفاده كند، چالشي بزرگ براي تركيب سنسورها ايجاد خواهد نمود.
بدون شك هوش مصنوعي به شكل شبكه هاي نوروني عميق به صورت گسترده استفاده خواهد شد. علاوه بر پردازش تصاوير و يا تشخيص اشياء، از اين تكنولوژي به عنوان منبعي براي اتخاذ تصميمات “تجربه رانندگي” استفده ميشود. به قطع هر يك از اين سه سنسور مزيت هايي را براي ساخت موج بعدي خودروهاي متصل به يكديگر به ارمغان مي آورند، اما پس از تقسيم بندي مزايا و معايب هر يك از اين گزينه ها میتوان پيش بيني هايي انجام داد.
ليدارها به خاطر هزينه هاي بالايي كه دارند به عنوان گزينه اي گران قيمت باقي مي ماند تا زماني كه شركت هاي OEM فكري به حال ساختار هزينه هاي خودروهاي خودگردان خود نمايند.
حركت به سوي خودروهاي تماما خودگردان سطح ٤ (SAE, 2014) نيازمند يك تكنولوژي كه متضمن ١٠٠ درصد امنيت افراد باشد خواهد بود، با اين حال خودروهاي سطح ٣–٢ نشان داده اند كه ليدارها نتوانسته اند اين سطح امنيت را فراهم سازند. رادارها يك تكنولوژي ثابت شده هستند كه روز به روز براي خودروهاي خودگردان كارآمدتر ميشوند. تكنولوژي جديد RFCMOS كه اخيرا روانه ي بازار شده است امكان استفاده از سنسورهاي كوچكتر، با مصرف انرژي كمتر و كارآمدتري را كه در استراتژي كاهش هزينه هاي OEM جا بگيرد فراهم ميسازد. اين موضوع باعث ميشود كه رادارها به عنوان “جفتي ديناميك” به مكملي براي دوربين ها تبديل شوند.
دوربين ها ارزانترين سنسور بين اين سه سنسور هستند و به احتمال زياد در آينده ي نزديك به عنوان پيشروي اين سه سنسور باقي خواهند ماند. آينده ي اين دوربين ها به شدت به پيشرفت و توسعه الگوريتم هاي نرم افزاري كه خودروهاي خودگردان را كنترل ميكنند و چگونگي پردازش حجم بالاي داده هاي ايجاد شده توسط آنها بستگي دارد.
برگرفته از مجلات آنلاین eetimesو rs-online